This note is about a formalization of classical mechanics due
to Gauss.
Gauss noticed that, roughly,
the constrained motion of masses is as close as possible
to their unconstrained motions, while still satisfying the constraints.
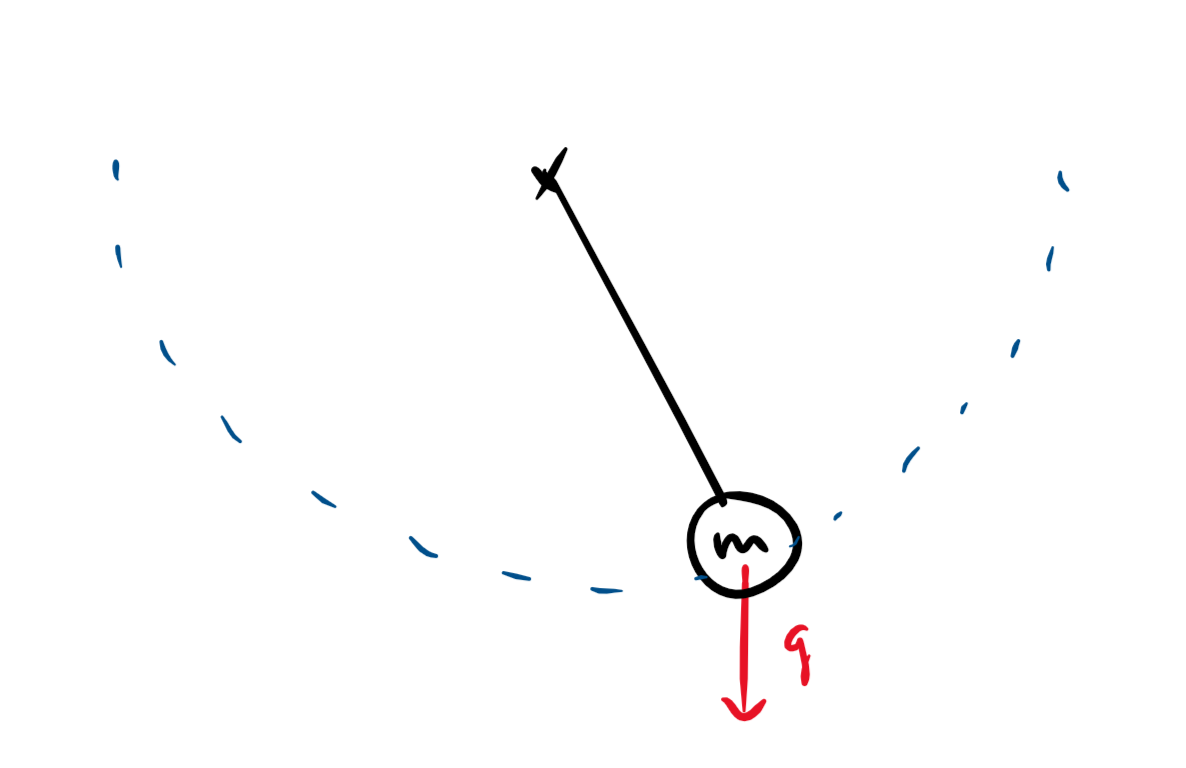
For example, a pendulum bob would naturally fall straight down, but is
constrained to a circle by its string -- so its true acceleration will be
as close as possible to straight down, while still remaining on the
string. This generalizes to essentially any constrained system.
Specifically, to find the true accelerations of masses in a
constrained system, we first find the accelerations as if they were
unconstrained, and then “project” to the closest
acceleration that satisfies the constraints. \[a_{\text{true}} =
\argmin_{a \in \text{ConsistentAccelerations}} ||a -
a_{\text{unconstrained}} ||^2_M\]
This formulation (which also holds in generalized coordinates)
is another nice extremal principle in physics,
and is the basis of some recent fast rigid-body physics simulations
(MuJoCo),
using convex optimization.
In this note, we state, prove, and discuss Gauss's principle,
assuming minimal prior knowledge.
We use it for a double-pendulum simulation just for fun.
Introduction & Motivation
The problem we are concerned
with is constrained dynamics . That is, we have some masses
interacting with external forces, and subject to constraints on
their state (eg, a ball constrained to move on a track, or two masses
connected by a rigid bar). We want to know
how they move.
Of course, this is the general problem of classical
mechanics, but we are focusing on how to deal with constraints. Directly
applying Newtonian mechanics can get very messy when dealing with
kinematic constraints, since it requires solving for all the
intermediary constraint forces. Often, we are not interested in what
forces are required to enforce the constraints, we just want to know the
eventual movement of the masses. (For example, a ball rolling along a
curved track – we are not interested in the forces required to keep the
ball on the track, just in the eventual motion of the ball).
Re-formulations of mechanics (such as Lagrangian mechanics, and Gauss's
principle) give us “implicit ”ways of dealing with
constraints.
Organization.
We first setup the problem and notation,
then in Section we state Gauss's
Principle and give several examples.
In Section we formally define the notion of "consistent
accelerations" required for Gauss's Principle.
Finally, we give a proof of Gauss's Principle in Section .
We conclude with remarks, historical references, and open problems.
Setup and Definitions
We specify the configuration of our system by some
collection of coordinates $\vec X \in \R^n$. For example, for $k$ masses
we could specify the positions of all the masses $\{x_i : x_i \in
\R^3\}$. We can also use generalized coordinates instead of
spatial ones, for example the angle of a pendulum.
A constrained system (to us) is one where the configuration
$X$ is constrained to lie on a manifold.
For example, we may have the constraint $x_1 = -x_2$,
or if two masses are connected by a rod of length $\ell$, the constraint
$||\vec x_1 - \vec x_2||_2 = \ell$.
Here, we will consider only constraints that do no net work on the
system (this is the case for most natural physical constraints).
Given a configuration $X$
on the manifold, let $T_X$ be the set of possible velocities of
the system at configuration $X$, which are consistent with the constraints.
Notice that $T_X$ is a subspace, and is in fact exactly the tangent space
of the manifold at $X$. (We will see examples soon).
Our condition that constraint forces do no net work is exactly the
condition that (in inertial coordinates) the collection of constraint forces $\Fconst$ is orthogonal to $T_X$.
The state of a system is given by the positions and
velocities $(X, \dot{X})$.
The mass matrix
is the matrix $M$ such that $\frac{1}{2}||\dot{q}||^2_M = \frac{1}{2}\dot{q}^TM\dot{q}$ is the kinetic
energy of the system, where $\dot{q}$ is the generalized velocities. (Such a
matrix always exists when the mapping $q_i(r_1, \dots r_n)$ between
generalized coordinates $q$ and spatial coordinates $r$ is
time-independent).
Our goal is: Given the constraint manifold and the current
state $(X, \dot{X})$ of a system, find the accelerations $\ddot{X}$.
This determines the entire trajectory $X(t)$.
This goal is the analog of Newton's law ($F=ma$) – it specifies the
local evolution of a system.
Gauss's Principle
Gauss's principle is:
Consider a constrained system subject to internal
and external forces, where the constraint forces do no net work.
Describing the system in generalized coordinates, let $A_U$ be the
generalized accelerations of the unconstrained system (with
non-constraint forces only). Suppose the system is in state $(X,
\dot{X})$, of generalized positions and velocities. Then, the true
generalized accelerations of the constrained system are
\[A_{\text{true}} = \argmin_{A \in \consaccel_{X, \dot{X}}} ||A -
A_U||^2_M \]
Where the norm $M$ is the mass matrix, and $\consaccel_{X,
\dot{X}}$ is the set of accelerations consistent with the
constraints at the current state.
The set $\consaccel$ is defined and discussed further below.
For example, if we describe our system in inertial, spatial
coordinates, and there is an external (non-constraint) force $\vec F_i$
acting on mass $m_i$, then the true accelerations satisfy:
Model the configuration
space as the position of the mass $(x, y) \in \R^2$, constrained to lie
on the manifold $C = \{(x, y): x^2 + y^2 = 1\} \subset \R^2$. The mass
matrix is simply $M = \begin{bmatrix} m &0\\ 0 &m \end{bmatrix}$.
The unconstrained acceleration of the mass is simply $g$, straight down
by gravity.
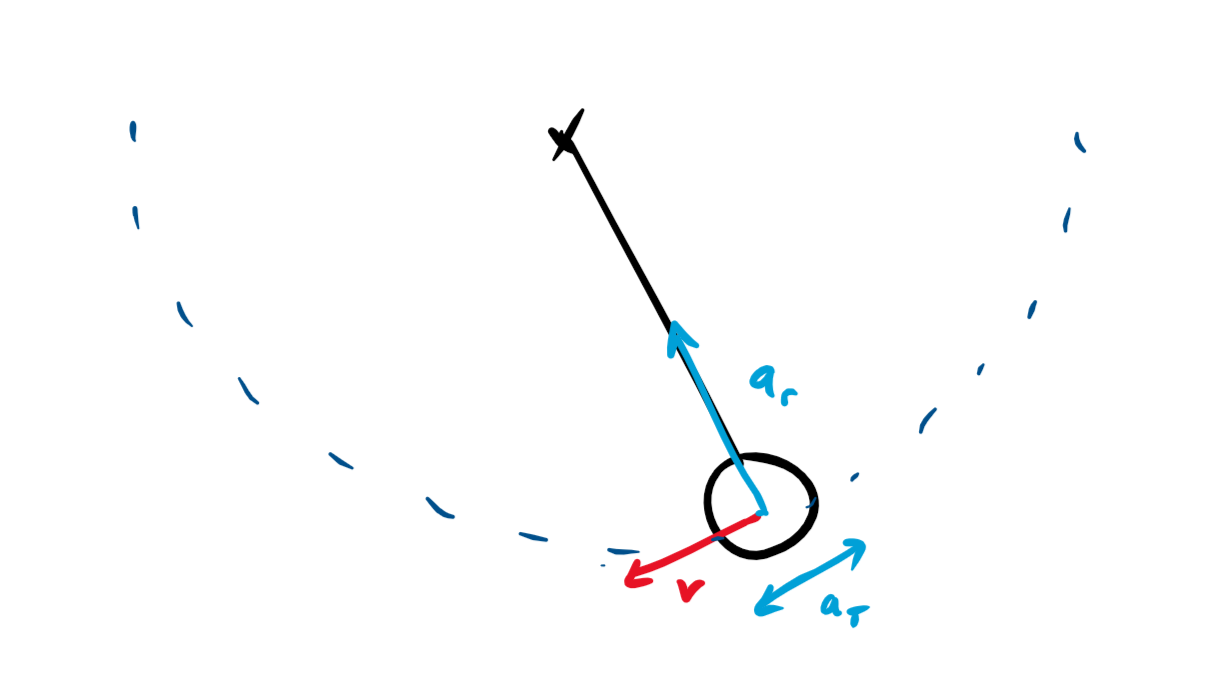
At a given state (position and velocity $v$) of the mass, let us consider
the space of consistent accelerations. The fixed velocity determines
the radial/centripital acceleration ($a_r$, in blue), so the only freedom is in the
tangential accelerations ($a_T$). Thus, the consistent accelerations are exactly
those with the given radial acceleration, and arbitrary tangential
acceleration. (This will be discussed further below.)
The projection of $g$ onto the consistent accelerations (as dictated by
Gauss's Principle) is equivalent to considering the tangential component
of gravity.
Note that we could not have directly used the angle of a pendulum
as a generalized coordinate when applying Gauss's Principle,
since we can't express the unconstrained acceleration
of the pendulum in terms of only this coordinate.
Thus, Gauss's Principle requires us to work in an ambient space
that includes even "off-shell" trajectories of the constrained system.
However, it is still possible to use generalized coordinates in our
representation, as we will see below.
Double Pendulum
In practice, it is still possible to use generalized coordinates
in our computations, though we will need to map it back
to spatial coordinates. This is useful for simulations, because we can
use coordinates that implicitly respect constraints.
For example, for the double pendulum,
we can represent the configuration space by the two angles
$\vec \theta = (\theta_1, \theta_2)$.
The set of consistent accelerations in $\theta$-space is
simply all of $\R^2$, since the angular accelerations can be arbitrary.
Thus, we just need to translate this set back into spatial coordinates.
The spatial coordinates $\vec r = (\vec r_1, \vec r_2)$ of the masses
are functions of $\theta$: $\vec r_i(\theta_1, \theta_2)$.
Now, at a given state
$S = (\theta_1, \theta_2, \dot{\theta_1}, \dot{\theta_2})$,
we have
$$
\ddot{\vec r} = Q_S \ddot{\vec\theta} + \vec b_S
$$
for some matrix $Q_S$ and vector $b_S$ depending on the state.
This follows simply by differentiating $\vec r(\vec \theta)$.
Thus, we can express the set of all kinematically
feasible accelerations as the affine space
$$\consaccel_S = \{Q_S \ddot{\vec\theta} + \vec b_S : \ddot{\vec
\theta} \in \R^2\}$$
This is extremely convenient, because we can now apply Gauss's Principle
to directly find $\ddot{\vec\theta}$, the generalized accelerations:
$$A = \argmin_{A \in \consaccel_S} ||A - A_\text{unconstrained}||^2
\iff
\ddot{\vec\theta}_{true}
= \argmin_{\ddot{\vec\theta} \in \R^2}
||Q\ddot{\vec\theta} + b - A_\text{unconstrained}||^2
$$
This is, presumably, something like what MuJoCo does.
Just for fun, here is an example implementation of the above
(plus some dampening for stability).
Try some random configurations.
On the left is a phase-space plot of $\theta$ vs $\dot{\theta}$
($\theta_1$ in blue, $\theta_2$ in red).
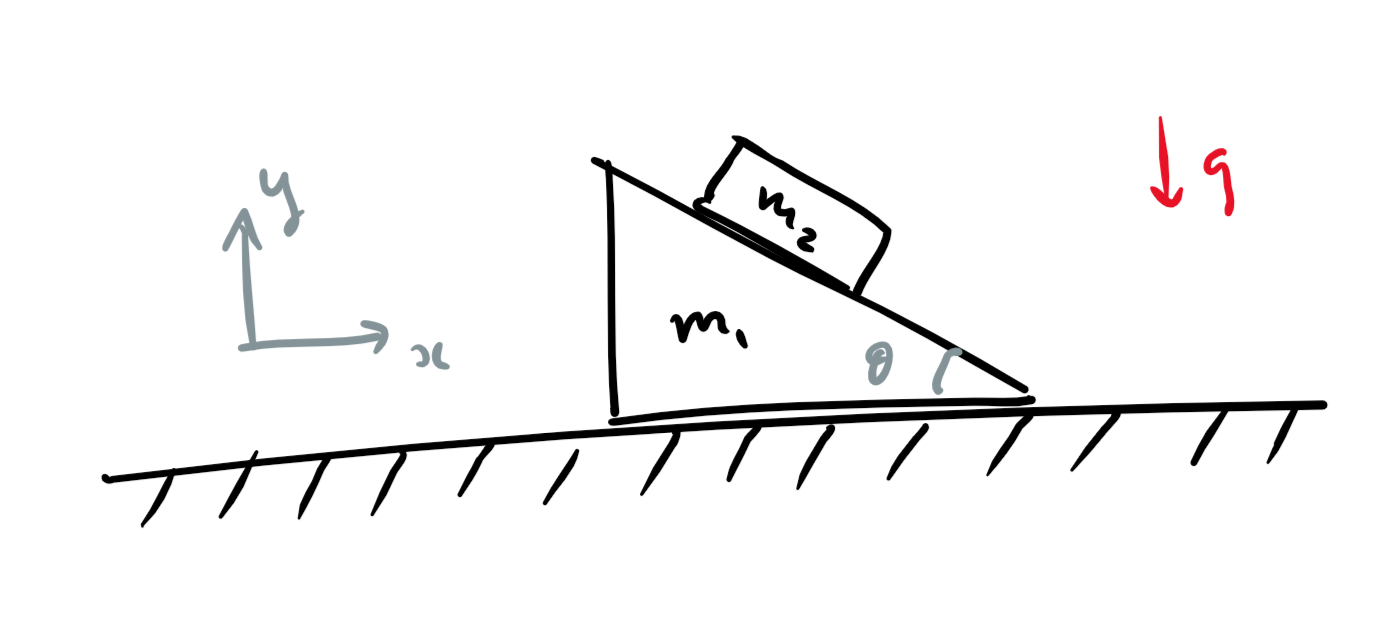
Sliding Blocks
Take the ambient space as the
$x$ coordinate of mass $m_1$,
and the $x, y$ coordinates of mass $m_2$:
$(x_1, x_2, y_2) \in \R^3$.
The 2-dimentional constraint manifold (for appropriate choice of orgin)
is defined by $\{(x_1, x_2, y_2): \tan \theta = y_2/(x_1-x_2)\}$,
expressing the constraint that the block remain on the wedge.
The mass matrix is again diagonal, since we are using inertial
coordinates: $M = diag(m_1, m_2, m_2)$.
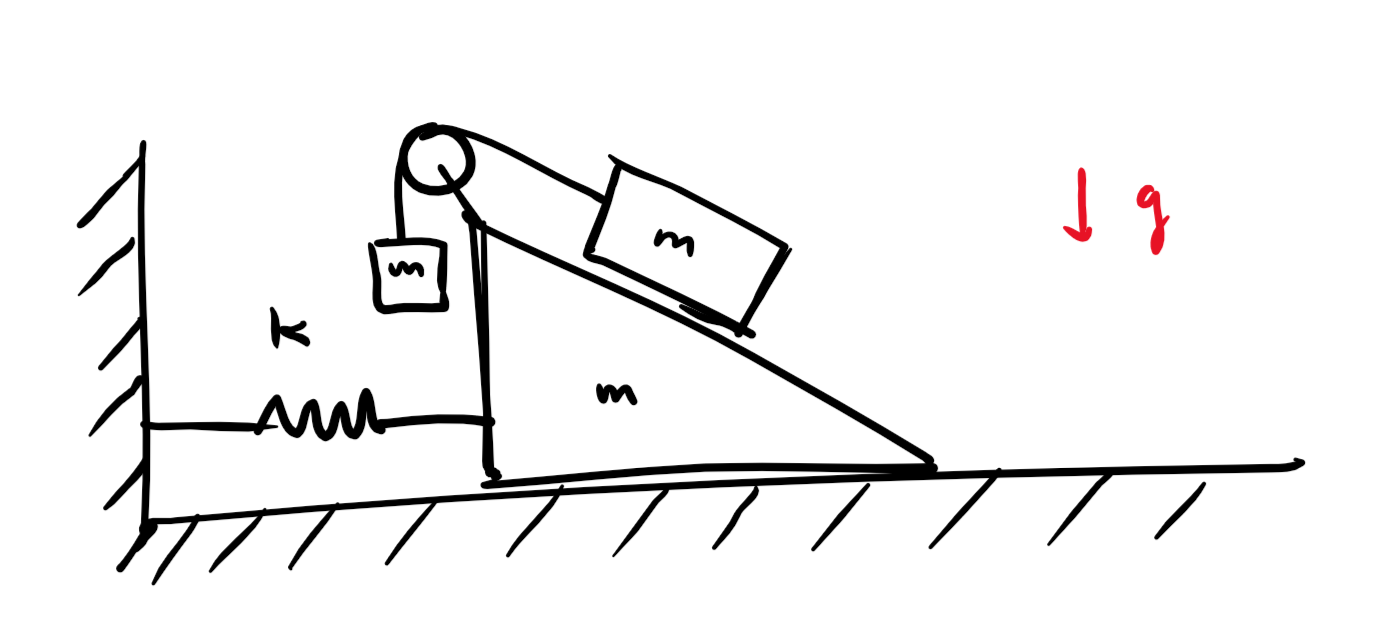
And More...
(Left as an exercise for the reader).
Note that we can handle internal non-constraint forces, such as springs
-- this is just incorporated into the unconstrained accelerations.
Consistent Accelerations
Here we define the set
$\consaccel$, and show a property that will be required in the proof of
Gauss's Principle.
We define $\consaccel$ in order to move from
constraints on the positions of masses to constraints on their
accelerations. This can be done by differentiating the manifold
constraint at the current state.
Formally, given the current state $(X, \dot{X})$ of a constrained
system, define the “consistent accelerations ”as the
following set. Consider all trajectories $\t X(t)$ which are
kinematically feasible (lie on the constraint manifold), and agree with
the current state at $t = 0$: $(\t X(0) = X, \dot{\t X}(0) = \dot{X})$.
The consistent accelerations are the set of all accelerations for these
feasible trajectories: \[\consaccel_{X, \dot X} := \{\ddot{\t X}(0)\}\]
The following property is important:
For a constrained system at
a given state $(X, \dot{X})$, the difference between two consistent
accelerations is in fact a consistent velocity .
That
is, the set $\consaccel_{X, \dot X}$ is an affine shift of $T_X$
(the tangent space of the constraint manifold).
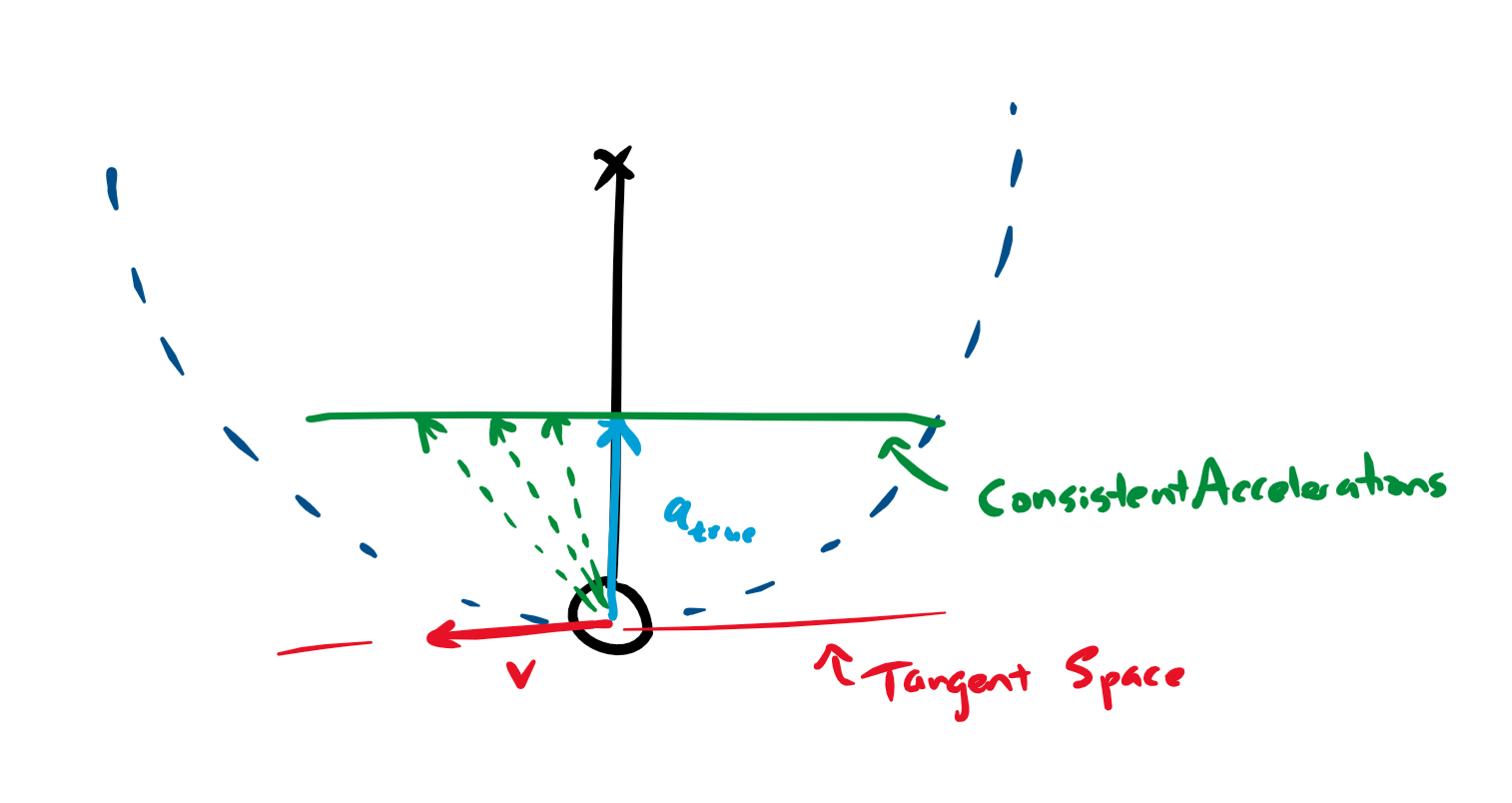
For
example, consider the consistent accelerations of a pendulum
at its bottommost point:
The true acceleration at this point is purely radial (upwards,
$a_{true}$ in blue),
and the consistent accelerations (dashed green) correspond to further tangential
accelerations.
Note that these tangential accelerations can be
identified with the tangent space of the constraint (tangential
displacements).
This follows directly from
differentiating the constraints. More formally: let $X_0(t)$ and
$X_1(t)$ be two consistent trajectories (on the manifold), which agree
in position and velocity at $t=0$. Let matrix $C_{X}$ be the (linear)
constraints defining the manifold at point $X$ (ie, $C_X$ is the orthogonal
complement to the tangent space $T_X$). That is, $C_{X} \dot{X_i}(t) = 0$ along
the trajectory. Differentiating, \begin{align*} \frac{d}{dt}(C_{X} \dot{X_i}(t))
&= \vec 0\\ \dot{C_{X}} \dot{X_i}(t) + C_X \ddot{X_i}(t) &= \vec 0 \end{align*}
Since $X_0$ and $X_1$ agree in position and velocity $(\dot{X_i)}$ at $t=0$,
subtracting the last relation for the two trajectories $i=0$ and $i=1$ yields
\[C_X( \ddot{X_1}(0) - \ddot{X_2}(0)) = \vec 0\] Thus, the difference in
accelerations is a consistent velocity: $\ddot{X_1}(0) - \ddot{X_2}(0) \in T_X $
This shows that $\consaccel_{X, \dot X}$ is contained in an affine shift of
$T_X$. (In fact, it is easy to show that this containment is an equality, but we
will not need this fact).
Proof of Gauss's Princple
We will prove this for the case of inertial,
spatial coordinates. This is without loss of generality, because the objective
function is invariant under changes of coordinates (because, if $A, M$ are
accelerations and mass matrices in generalized coordinates, and $a, m$ are their
counterparts in spatial coordinates, then $||A||_M = ||a||_m$, and furthermore
the constraint manifold transforms naturally).
Here are several equivalent ways of proceeding:
Approach 1:
Suppose the true acceleration is $A_{true}$, and consider a
consistent acceleration $A$.
By Lemma ,
any consistent acceleration $A$
must have the form $A = A_{true} + \delta$
for some $\delta \in T_X$ (where $T_X$ is
the tangent space to the constraint manifold, ie the
“consistent velocities”).
We will show that any consistent acceleration $A = A_{true} + \delta$
will have larger norm
$||A - A_U||_M^2 \geq ||A_{true} - A_U||_M^2$.
Consider the gradient of the objective
\begin{align*}
\grad_A ||A - A_U||_M^2 &= (M(A - A_U))^T \end{align*}
The key
observation is that at the true accelerations $A = A_{true}$,
this gradient is exactly the constraint forces
$\Fconst$ on the system. That is, \[ \grad_A ||A - A_U||_M^2
|_{A = A_{true}} = 2(M(A_{true} - A_U))^T = 2\Fconst^T \]
Because, $MA_{true} - MA_U = F_{net} - F_{\text{external}} =
\Fconst$. Further, since constraint forces do no work, we know
that $\Fconst \perp T_X$.
Thus, at the true acceleration, the gradient ($=\Fconst$) is
orthogonal to all possible consistent perturbations ($\delta \in
T$). This is sufficient to show optimality, by convexity of the
objective, and the set $\consaccel$. So the true acceleration minimizes
the objective among the set of consistent accelerations.
Approach 2:
Consider the minimizer $A^*$ in
$$ A^* = \argmin_{A \in \consaccel_{X, \dot{X}}} ||A - A_U||^2_M $$
By Lemma , we know the set $\consaccel$ is an affine
shift of $T_X$.
Thus, this minimization is simply the projection of $A_U$ onto an affine shift
of $T_X$, under the $M$-norm. This projection $A^*$ is charecterized uniquely
by $M(A^* - A_U) \perp T_X$.
But, as we saw above, the true acceleration $A_{true}$ satisfies this, since
$M(A_{true} - A_U)$ is the constraint force. Thus, $A^* = A_{true}$.
Approach 3:
In fact, we can directly show that any consistent acceleration $A$ must have larger
objective:
$$
\forall A \in \consaccel_{X, \dot{X}}: ~\|A - A_U\|_M^2 \geq \|A_{true} - A_U\|_M^2.
$$
By Lemma ,
any consistent acceleration $A$
must have the form $A = A_{true} + \delta$
for some $\delta \in T_X$.
Then, using the
fact that $\Fconst \perp \delta$,
$$
\begin{align*}
\|A - A_{U}\|_M^2 &= \|A_{\rm true} + \delta - A_{U}\|_M^2\\
&= \|A_{\rm true} - A_{U}\|_M^2 + \|\delta\|_M^2 + 2\delta^TM(A_{\rm true} - A_{U})\\
&= \|A_{\rm true} - A_{U}\|_M^2 + \|\delta\|_M^2 + 2\delta^T \Fconst\\
&= \|A_{\rm true} - A_{U}\|_M^2 + \|\delta\|_M^2\\
&\geq \|A_{\rm true} - A_{U}\|_M^2
\end{align*}
$$
Note
that it was important we used inertial coordinates in the proof, so we could
apply $F_{net} = MA$.
Concluding Remarks
It would be nice to express Gauss's Principle intrinsically
(via the configuration manifold),
instead of relying on an embedding of the constraint manifold in $\R^k$.
However, it there is an obstacle:
To talk about the "unconstrained motion" of masses,
it is not enough to only know about their "on-shell" trajectories -- we need
to be able to describe their trajectories with no constraints applied.
This is the issue we ran into in the pendulum example, where we could not use
the angle as a generalized coordinate.
Question: Can Lemma , relating consistent
velocities to consistent accelerations, be stated intrinsically? (without
relying on an embedding in $\R^k$).
This is unclear, since a priori the velocity-space and acceleration-space
are different structures.
There is a heuristic technique used in game physics
(Verlet Integration)
to deal with position constraints.
The technique is essentially
"update positions as if unconstrained, and then project back onto
the consistent positions." This is similar to Gauss's Principle, though the
projection is happening on positions, and not accelerations.
I believe this is can be shown to be equivalent in some cases, under reasonable
assumptions.
Related extremal principles
(not technically equivalent, but all involve similar ideas):
Lagrange's Principle of Least Action
That the true trajectory of a system is that which minimizes the
Action, among all consistent trajectories.
Thomson's Theorem in Electrostatics
That the true distribution of charges is that which minimizes the
electric field energy, among all distributions with the same boundary conditions.
For example, the voltages in a network of capacitors is such
that the potential energy is minimized.
Related, the true currents in a network of resistors is the
minimum-energy flow, subject to the flow constraints.
The original
paper by Gauss, "Über ein neues allgemeines Grundgesetz der
Mechanik".
He states his principle, and gives a proof by one example.
The MuJoCo computation
page, describing how MuJoCo uses a variant of Gauss's Principle for
fast physics simulation.
Page 254 of
[Whittaker]
, a book on analytical dynamics, gives a proof of a version of
Gauss's Principle (described as the "least-curvature principle").
The
Udwadia–Kalaba equation
is essentially just Gauss's Principle
(reading the wikipedia page is not recommended).
Acknowledgements.
Thanks to Thibaut Horel for suggestions on the presentation and proof,
and Darius Shi for catching various errors.
Questions, comments, suggestions are welcome: preetum@cs.harvard.edu
Last Updated: January 9, 2018.
 At a given state (position and velocity $v$) of the mass, let us consider
the space of consistent accelerations. The fixed velocity determines
the radial/centripital acceleration ($a_r$, in blue), so the only freedom is in the
tangential accelerations ($a_T$). Thus, the consistent accelerations are exactly
those with the given radial acceleration, and arbitrary tangential
acceleration. (This will be discussed further below.)
The projection of $g$ onto the consistent accelerations (as dictated by
Gauss's Principle) is equivalent to considering the tangential component
of gravity.
At a given state (position and velocity $v$) of the mass, let us consider
the space of consistent accelerations. The fixed velocity determines
the radial/centripital acceleration ($a_r$, in blue), so the only freedom is in the
tangential accelerations ($a_T$). Thus, the consistent accelerations are exactly
those with the given radial acceleration, and arbitrary tangential
acceleration. (This will be discussed further below.)
The projection of $g$ onto the consistent accelerations (as dictated by
Gauss's Principle) is equivalent to considering the tangential component
of gravity.
 Take the ambient space as the
$x$ coordinate of mass $m_1$,
and the $x, y$ coordinates of mass $m_2$:
$(x_1, x_2, y_2) \in \R^3$.
The 2-dimentional constraint manifold (for appropriate choice of orgin)
is defined by $\{(x_1, x_2, y_2): \tan \theta = y_2/(x_1-x_2)\}$,
expressing the constraint that the block remain on the wedge.
The mass matrix is again diagonal, since we are using inertial
coordinates: $M = diag(m_1, m_2, m_2)$.
Take the ambient space as the
$x$ coordinate of mass $m_1$,
and the $x, y$ coordinates of mass $m_2$:
$(x_1, x_2, y_2) \in \R^3$.
The 2-dimentional constraint manifold (for appropriate choice of orgin)
is defined by $\{(x_1, x_2, y_2): \tan \theta = y_2/(x_1-x_2)\}$,
expressing the constraint that the block remain on the wedge.
The mass matrix is again diagonal, since we are using inertial
coordinates: $M = diag(m_1, m_2, m_2)$.
 (Left as an exercise for the reader).
Note that we can handle internal non-constraint forces, such as springs
-- this is just incorporated into the unconstrained accelerations.
(Left as an exercise for the reader).
Note that we can handle internal non-constraint forces, such as springs
-- this is just incorporated into the unconstrained accelerations.
 The true acceleration at this point is purely radial (upwards,
$a_{true}$ in blue),
and the consistent accelerations (dashed green) correspond to further tangential
accelerations.
Note that these tangential accelerations can be
identified with the tangent space of the constraint (tangential
displacements).
The true acceleration at this point is purely radial (upwards,
$a_{true}$ in blue),
and the consistent accelerations (dashed green) correspond to further tangential
accelerations.
Note that these tangential accelerations can be
identified with the tangent space of the constraint (tangential
displacements).